Vsebina
Članek je nadaljevanje prejšnjega z naslovom Leteči avtomobil je nesmisel.
Letalna naprava, ki vzleti kot helikopter in nadaljuje polet kot letalo, je vse bolj želena tehnologija, posebno sedaj, ko so bili prvi koraki že uspešno opravljeni. Bell Boeing V-22 Osprey, ki je za sedaj edina praktična izvedba ideje, je postal nepogrešljiv del vojske ZDA.
Kar nekaj družb se je na osnovi V-22 odločilo razvijati potniške izvedenke. K temu gotovo prispeva razvoj tehnologij kot so vse lažji in močnejši motorji, vse trpežnejši in zmogljivejši materiali, vse bolj razdelane aerodinamične teorije in vse bolj izpopolnjeni programi za upravljanje kompleksnih principov letenja. Vendar pa združevanje helikopterja in letala v eno letalno napravo, še vedno predstavlja velik zalogaj. Predvsem zaradi nekaj nujnih osnovnih kompromisov. Na prvem mestu vijaka, ki mora biti vsaj toliko helikopterski, da omogoča lebdenje in vsaj toliko letalski, da dovolj hitro vleče letalo skozi zrak.
Naslednji nujno potreben in nič manj pomemben je kompromis krila, ki je v vlogi letalne naprave kot helikopterja popolnoma neuporabno, v vlogi letala pa mora biti vsaj tako veliko, da omogoča optimalen polet. Podobnega usklajevanja so deležni tudi motorji, ki so pri helikopterjih nekoliko drugačni kot pri letalih, pa sistem upravljanja letalne naprave in ne nazadnje tudi oblika VTOL (vertical take-off and landing) letalne naprave. Ta mora slediti nekaterim nujnostim helikopterja, kot je recimo širok trup za koristen tovor, in nekatere nujnosti letala, kot je aerodinamičen trup z majhnim čelnim presekom zaradi zmanjšanja čelnega upora pri visokih hitrostih, ki jih helikopter ne doseže.

AW 609 je prototip VTOL letalne naprave družbe Leonardo, ki jo je ustanovil Instituto per la Ricostruzione Industriale s sedežem v Rimu. Projektu so se pridružili raziskovalni deli družb AgustaWestland, Alenia Aermacchi, DRS Technologies, Selex ES, Oto Melara in WASS. Po več kot desetih letih preizkusov in dograjevanj leti še vedno le kot eksperimentalni in predstavitveni prototip.
Vijak
Glavni kompromis pri vijaku je posledica njegove dvojne vloge. Zadovoljiti mora vlogo helikopterskega rotorja in vlogo letalskega vijaka. Ker za sedaj ni tehnične rešitve, ki bi omogočala preobrazbo vijaka oziroma njegovega kraka za eno in drugo nalogo med poletom, je druga možnost v kompromisu vijaka, ki zadovoljuje obe vlogi. Pri tem mora v vsaki vlogi nekaj izgubiti oziroma žrtvovati za drugo vlogo, ki jo mora opravljati.
V vlogi helikopterskega vijaka je vijak torej rotor, tvorec vzgona oziroma nosilec celotne vzletne teže naprave. Obenem mora s svojo mehaniko, skrbeti še za vodoravni polet in upravljanje. Značilnosti helikopterskega vijaka so večji premer, vitki kraki in nizko število vrtljajev. Motor in vijak morata ves čas poleta skrbeti za dovolj velik vzgon, ki nosi težo naprave in skrbeti za rezervo moči, ki je potrebna za upravljanje in vodoravni polet. Helikopterji so zato zelo požrešni porabniki goriva, zahtevni za vzdrževanje in omejeni, ko gre za hitrost poleta.
V vlogi letalskega vijaka je ta tvorec vlečne sile, ki daje letalu hitrost, ki jo potrebuje krilo za tvorjenje vzgona. Značilnost letalskih vijakov v primerjavi z vijakom helikopterja so majhen premer, visoko število obratov in manjša vitkost krakov. Zato je letalo veliko varčnejše od helikopterja, hitrejše, večjega dosega in bolj nosilno pri enaki porabi energije.
Kompromis vijaka
Glavna omejitev vsakega vijaka je hitrost gibanja konice kraka, ki ne sme presegati hitrosti zvoka 340 m/s. Čeprav helikopterski vijak ne dosega visokega števila obratov, pa je njegov premer velik in konica kraka se hitro znajde v območju zvočne hitrosti. Pri vijaku letala, ki sicer nima velikega premera, pa se podobno zgodi zaradi potrebnega velikega števila obratov.
Krak vijaka je aerodinamična površina, ki mora proizvajati vzgonsko silo v določenih pogojih in je v tem smislu podoben krilu. Helikopterski krak se giblje počasneje, je zato vitkejši in podoben krilu jadralnih letal. Letalski vijak se giblje hitro, je zato krajši, manj vitek in podoben krilu hitrih letal. Kompromis kraka za rotor naprave, ki bi posnemale helikopter in letalo hkrati, mora biti kompromis med omenjenima krakoma rotorja helikopterja in letala. Gre za zelo zahtevno misija in zdi se, da so ji bili uspešno kos le pri ameriških družbah Bell in Boeing.

Vijak transportnega letala HC-130 Hercules družbe C&S Propeller, ki je del pogonskega sistema 54H60. Deluje na stalnem številu 1030 obratov na minuto (rpm) image by Flightzone

AS AL 532 Cougar je helikopter družbe Airbus Helikopter in slovenske vojske. Premer rotorja s štirimi kraki je 15,6 m in omogoča dvig do 5 ton tovora vključno z gorivom. Vitki dolgi kraki se vrtijo z 265 obrati v minuti (rpm).
Dawnwash vijaka
Dawnwash oz. zračni tok je posledica delovanja helikopterskega vijaka in proizvajanja vzgona in je usmerjen v nasprotni smeri sile vzgona. Zaradi več razlogov gre za zelo neprijeten pojav. Pri lebdenju nad tlemi oziroma pristankih in vzletih helikopterja ali VTOL letalne naprave, zračni tok udarja v tla in vrtinči materialne delce. Vrtnici ne dvigujejo samo prah ampak tudi večje delce, ki lahko poškodujejo letalno napravo, vijake ali zaidejo v motorje. Zvrtinčeni tok, ki ga ustvarjajo vijaki VTOL letalne naprave imajo v določenih situacijah neprijeten vpliv tudi na aerodinamične površine preko katerih prehajajo. Hitrost zračnega toka je odvisna od obremenitve vijaka oziroma razmerja med težo, ki jo vijak nosi in površino diska rotorja. To pomeni, da večja kot je površina diska oziroma premer rotorja, manjša je obremenitev rotorja, ta pa je premo sorazmerna s hitrostjo dawnwash zračnega toka. Manjši vijaki, ki imajo večje hitrosti vrtenja, imajo tudi hitrejši dawnwash.

UH-60 med pristajanjem na peščeno površino. Klub relativno nizki obremeniti diska, okoli 35 kg/m2, je zračni tok navzdol zelo močan. Slika prikazuje eno glavnih pomanjkljivosti helikopterja, ki se ji načrtovalci letečega avta zaradi aerodinamičnih zakonitosti ne morejo izogniti – dawnwash.
Konstrukcija vijaka VTOL letalnih naprav je zelo zahteven aerodinamični podvig, ki so mu kos le redki graditelji letal. Kljub vloženemu trudu je v vlogi helikopterskega vijaka znatno manj zmogljiv od vijakov helikopterjev in enako v vlogi letalskega pogona v primerjavi z vijaki podobnih letal. Neprijetni pomanjkljivosti, ki se jima graditelji ne morejo izogniti, sta močan zračni tok usmerjen v tla, ko letalo lebdi nad tlemi in vpliv zračnega toka na krila in ostale aerodinamične in stabilizacijske površine, kar omejuje letalne zmogljivosti VTOL letalnih naprav v določenih položajih.
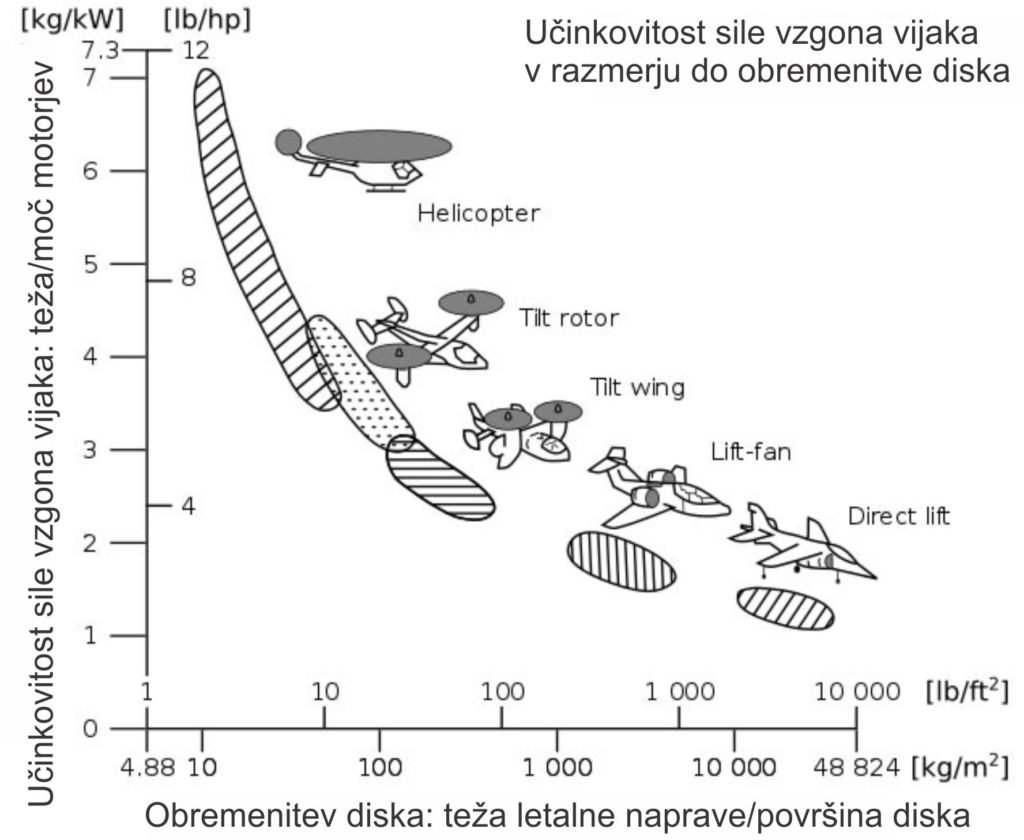
Iz grafikona je videti, da je učinkovitost sile vzgona rotorja obratno sorazmerna obremenitvi diska, torej površine ki jo zavzema rotor pri delovanju. Obremenitev diska pa je obratno sorazmerna površini diska. Skratka večji kot je premer rotorja, manjša je obremenitev in večja učinkovitost vzgona. Rotorji, ki jih danes prikazujejo kot rešitev pri letečih avtomobilih (tilt wing na grafu), so majhnih premerov in izrazito neučinkoviti proizvajalci vzgona.
Krilo
Krilo pri do sedaj najučinkovitejših rešitvah VTOL letal, V-22 in AW609, je zelo neučinkovito. Krilo pri teh napravah mora zadovoljiti še prostor za prenos moči med mootrjema na koncih in je zato debelo in kratko, kar ni recept za dobre letalne lastnosti. Taka oblika krila je zelo neugodna, ko je potrebno leteti kot letalo. Zato taka letala ne morejo izvesti enostavnega manevra, ki je v mnogih primerih rešilen za letala – jadrati. Polet brez pomoči motorjev je značilnost vseh letal in neredko učinkovita rešitev, celo za velika potniška letala. Poleg tega je učinkovitost takega debelega in kratkega krila veliko manjša pri poletu samem, tako pri nizkih hitrostih kot pri visokih potovalnih hitrostih.
Kompromis krila pri VTOL letalnih napravah
Najuspešnejši že prej omenjeni VTOL letali, V-22 oziroma civilna izvedenka BA609 (AW609), imata na koncih kril pripeta motorja, ki se lahko zavrtita za določen kot naprej ali nazaj – tilt rotorja. Letalo z enako nosilnostjo, bi imelo zelo drugačno krilo in letelo veliko varčnejše in hitreje. Takšna konstrukcija krila je nekakšen kompromis med nosilcem, ki povezuje trup in motor ter krilom kot aerodinamično površino, ki mora skrbeti za vzgon. Pri takih zahtevah pa graditeljem ne ostane veliko prostora za učinkovito krilo.
Primerjava med V-22 in letalom primerljive nosilnosti Casa C-295 pokaže, da je krilo letala Casa veliko bolj vitko kar pomeni bolj učinkovito. Sicer bi morda krilo samo pri V-22 še omogočilo kolikor toliko uspešno jadranje, s sicer skromno fineso kril 4,5 : 1, vendar pa to onemogočata velika rotorja na koncih kril, ki se ju ne da postaviti v kakršen koli položaj, ki pri tem ne bi bila v napoto. Letalo V-22 Osprey je brez delujočih motorjev zelo nebogljen tič.

Stabilnost pri prehodu iz helikopterskega režima v letalski režim poleta
Pri VTOL letalnih napravah je tako kot pri ostalih zračnih plovilih predvidena procedura, postopek z določenimi pravili oziroma parametri, ki določa način pristajanja in vzletanja. Tako se ustvarijo posebni virtualni hodniki po katerih je letenje izvedeno. Ti temeljijo na letalnih lastnostih naprave. Eden od pogojev, ki mora biti med tem izpolnjen ves čas je stabilnost letalne naprave oziroma njena upravljivost.
Za VTOL letala veljajo nekatera pravila značilna za helikopterje in obenem nekatera značilna za letala. Pri helikopterju mora biti teža zbrana okoli središča rotorja, nastale zamike pa kroti rotor, ki lahko ustvarja vzgon na različnih koncih diska z regulacijo vpadnega kota kraka na določenem mestu na svojem krožnem obhodu. Pri letalu, pri katerem je teža zbrana okoli aerodinamičnega centra krila oziroma nekoliko pred njim, pa za kompenzacijo položaja težišča skrbijo repne aerodinamične površine oziroma stabilizatorji. Oba načina kompenzacije imata svoje okvirje, ki jih ne ena ne druga letalna naprava ne smeta preseči.

V-22 Osprey (sokol) v fazi prehoda iz helikopterskega načina lebdenja v vodoravni polet (simbolični prikaz). Ena od kritičnih faz poleta, ko vzgon od rotorjev prevzemajo krila, ki pa za tvorjenje vzgona potrebujejo določeno minimalno hitrost. Zapleten postopek bi bil nemogoč brez podpore računalnika.
V-22 kot najuspešnejša rešitev VTOL letalne naprave v zasnovi svoje gradnje rešuje vprašanje ravnovesja tako, da je težišče, kadar naprava leti kot letalo v bližini aerodinamičnega centra krila, kadar pa leti kot helikopter, je sicer težišče na istem mestu vendar obenem v bližini navpične osi rotorjev. Za uravnovešanje v režimu letala, V-22 uporablja repni stabilizator, za uravnovešanje v vlogi helikopterja pa uporablja rotorja oziroma možnost rotorja, da glavno vzgonsko silo rotorja s posebnimi principi seli po površini diska rotorja.
Glavna zamisel graditeljev je bila narediti letalno napravo okoli težišča tako, da položaj težišča odgovarja tako konstrukciji letala kot helikopterja. Posledica je prekrivanje položaja krila, ko je naprava v vlogi letala, s položajem rotorjev po vzdolžni osi, ko je naprava v vlogi helikopterja. Iz tega pa izhaja interakcija krila in rotorjev zaradi zračnih tokov, ki jih ustvarjata. Ko so rotorji v navpičnem položaju njihov zračni tok, ki dosega hitrosti do 150 km/h, tolče na zgornjo površino krila in s tem zmanjšuje svojo učinkovitost, ustvarja vibracije in močno vrtinčenje zraka okoli letala. Pri prehodu iz helikopterskega v letalski način letenja in obratno, ko se motorja izravnavata iz navpičnega v smer vzdolžne osi letalne naprave, zračni tok njunih rotorjev prav tako prehaja preko krila, kar zmanjšuje učinkovitost aerodinamičnih površin in ustvarja neprijetna vrtinčenja okoli krila.
Virtualni hodnik pri pristanku ali vzletu V-22 je zaradi vsega tega zelo ozek. Sploh pri pristankih, ko se mora letalo izogibati učinka “vortex ring state“. V določenih položajih spuščanja, helikopterski rotor namreč lahko zaide v svoj lastni zračni tok, ki ga je rotor izrinil proti tlom. V takih primerih rotor izgubi vzgon. Zadeva je neprijetna, vendar rešljiva z nekoliko spretnosti pilota. Je pa veliko bolj nevarna pri V-22, ki ima dva rotorja in se izguba vzgona v takem primeru, prej pojavi na enem kot na drugem. To povzroči prevračanje letala in neizogibno nesrečo. Teh je bilo v razvojni fazi kar nekaj. Zaradi tega mora biti procedura pristajanja pri V-22 zelo natančna in ne omogoča kakšnih velikih improvizacij. Vse to je prav tako cena kompromisa s katero se mora V-22, kot najboljša VTOL letalna naprava v uporabi do sedaj, enostavno sprijazniti, če želi biti oboje in letalo in helikopter.
Leteči avtomobili?
V tridesetih letih prejšnjega stoletja se je ob navdušenju nad razvojem letalstva in optimizmu po veliki vojni, že enkrat sanjalo o tem, kako bodo ljudje letali namesto vozili po cestah. Šlo je za preveč optimizma tako okoli vsemogočnosti tehnologije kot okoli dolgotrajnega obdobja miru.
Osnovne zahteve, ki jih mora rešiti leteči avtomobil so torej povezane z aerodinamiko. Govorimo o učinkovitosti rotorjev ali reaktivnega pogona in neizogibnega zračnega toka okoli vozila. Za sedaj ponujene rešitve z mnogimi manjšimi rotorji (celo več kot 30) navidezno odklanjajo težavo. Vsa ta vozila so namreč sila lahka in imajo majhno vzletno težo. Nekaj sto kilogramov nosilnosti pa prav gotovo ne more imitirati avta v leteči varianti – kvečjemu skuter. Tukaj pa govorimo o vprašanju zamenjave klasičnega avta z letečim.
Udobje in nosilnost
Priljubljenost današnjega osebnega avta gre predvsem praktičnosti. V avtomobil, ki je lahko v garaži znotraj hiše ali največ na parkirišču v bližini stanovanja, vstopamo hitro z zanemarljivo potjo ali porabo časa. Ravno tako si želimo, da imamo od parkiranega avtomobila do končne točke obiska, kar se da kratko pot. Kljub urbanim zagatam, ki včasih obe poti podaljšajo, še vedno govorimo o sprejemljivih razdaljah in času. Leteči avtomobil tega ne bo mogel nadomestiti, saj potrebuje v kakršni koli varianti veliko več prostora kot je garaža ali parkirni prostor. S tem se podaljšata tudi razdalji med bivalnim prostorom in vstopno točko v vozilo in na drugi strani razdalja med izstopno točko iz vozila in želenim ciljem potovanja.
Po podatkih AMZS tehta Smart forfour z motorjem z 52 kW 1004 kilograme, karavanska Insignia z 2-litrskim dizelskim motorjem pa 1863 kg. Otovorjena avtomobila z gorivom, vsaj s tremi potniki in njihovo počitniško opremo ali nakupovalno košarico tehtata še najmanj 300 kg več. Torej lahko povprečnemu avtomobilu, ki zagotavlja določeno udobje pri prevozu, pripišemo težo okoli 1500 kg.
AeroMobil ali Terrafugia Transition zastopata koncept “transformer” preoblikovanja iz cestnega v leteči avto. V cestni vožnji gre za ne prav dober avtomobil, saj sta oba namenjena le dvema potnikoma oziroma okoli 250 kg skupne nosilnosti (potniki, gorivo, prtljaga). Pri letenju vozili tudi nista prav dobri letali. Ob tem potrebujeta pristajalno vzletno stezo in dober kompromis med avtomobilskim in letalskim podvozjem. Pri konceptu kvadrokopterja ali “drona na stereoidih” je zadeva še slabša. Po podatkih, ki bi šli v prid letečemu avtomobilu, gre kapa dol vozilu Moller Skycar M400 (spodaj na sliki). Teža praznega bi bila 1088 kg in polno otovorjenega 1415 kg, kar bi ga uvrstilo v kategorijo manjšega osebnega avtomobila. Njegova prednost bi bila hitrost – nekaj manj kot 500 km/h. Vzpel bi se lahko do 10 km višine. Nekaj več kot 6 m dolgo in dobra 2,5 m široko vozilo tudi na dvorišču ne bi bilo preveč v napoto. Kvari ga predvsem davek, ki ga je potrebno plačati aerodinamiki. Namenjeno je samo dvema potnikoma, skupna moč osmih motorjev, ki so potrebni za doseganje objavljenih zmogljivosti pa znaša skoraj 1500 KM. Dawnwash iz vijačnih tub bi pihal proti tlom z več kot 250 km/h. Razvija in predstavlja ga družba Moller International.

Nadomestiti osebni cestni avtomobil, ki bo postal leteči in prenesel cestni promet v zrak, ne bo nikoli uresničen sen. Težava je med ostalim tudi zniževanje udobja. Avtomobil parkiran pred hišo ali v njej, za začetek poti zahteva samo obrat ključa in prav tako samo prekinitev kontakta ob koncu poti. To je udobje, ki ga letalna naprava ob zakonih aerodinamike ne more ponuditi.
Leteči avto bo moral tudi praktično ne samo konceptualno nakazati zamenjavo za cestni avtomobil. Kompromis, ki je za to potreben je združitev sedanjih udobja in zmogljivosti cestnega avtomobila z aerodinamičnimi zahtevanimi principi. Potreben je tudi razmislek o radikalnih spremembah pri urbanističnih pristopih in gradnji. Vsekakor bi bila potrebna večja parkirišča za leteče jeklene konjičke, morda ravne strehe zasebnih hiš? Tudi veščine potrebne za upravljanje vozil se razlikujejo. Sedanji moderen avto zahteva od voznika le nakazovanje smeri z volanom, pritiskanje stopalke za plin ali elektriko in upoštevanje cestno prometnih predpisov. V bližnji bodočnosti bo vodenje avta še bolj praktično in enostavno. Za vodenje letečega avtomobila bodo kljub kakršni koli avtomatizaciji in robotizaciji potrebne večje veščine. Enako ko gre za predpise in pravila prometa po zraku. Ta bodo izvirala iz sedanjih predpisov za letalski promet, ki že sedaj niso enostavna in niti ne morejo biti. Videti je, da so pri vsem trem sanje in razmišljanja eno, zakonitosti aerodinamike in prometa po zraku pa nekaj drugega.
Sanje niso nove
V petdesetih letih prejšnjega stoletja, se je nato zopet sanjalo o tem, kako naj bi kmalu prišli časi, ko se bo samo še létalo. Takrat je evforijo povzročil hiter razvoj letalstva. Oživljena je bila ideja avtožira, naprave iz 1936 španskega graditelja De la Cierve, ki naj bi postala enostavno zračno prevozno sredstvo za vsakogar in nadomestila avto.



Čeprav je princip avtožira celo primernejša nadomestitev osebnega avtomobila kot današnji kvadrokopterji, do tega ni prišlo. Najverjetneje bomo kmalu dobili električni avto, ki bo vozil brez voznika, gre pa razvoj avtomobila samega v slepo ulico, prav tako kot ideja letečega avtomobila. Če je leteči avto nesmisel zaradi nujnega močnega pihanja navzdol, je cestni avto tudi v bodočnosti omejen s podobnim zakonom fizike – oprijemom s podlago. Že danes vlaki oziroma tirna vozila, na klasičnih ali magnetnih tirih lahko varno vozijo s standardno hitrostjo 250 km/h, kar pa je za avtomobil ne glede na elektronske sisteme zelo nevarna hitrost. Tako se da kar z veliko gotovostjo sklepati, da bodo v bodočnosti mestni in obmestni, če ne celo medcelinski promet, prevzela različna tirna, magnetna in vakuumsko cevna vozila – pred letalom in pred avtomobilom oziroma pred kakršnim koli njunim hibridom.
Morda še najbolj usodno se zdi vprašanje zaslužka. Zelo pomembno je namreč ali bodo na novo nastali finančni interesi korporacij ali koga drugega, več dobička videli pri zagovarjanju avtomobila kot osebne prestižne lastnine oziroma osebnega prevoznega sredstva, ali v celotni ponudbi mreže magnetnih ali kakšnih drugačnih tirov in vozil za osebno rabo. Tudi to se je že zgodilo ob koncu 19. stoletja, ko se je odločalo o električnem avtomobilu ali avtomobilu z motorjem z notranjim izgorevanjem. Slednji je dobil prednost zaradi obetavnejših in hitrejših zaslužkov takratnih investitorjev, ki so raje vlagali kratkoročno v nafto kot pa dolgoročno v baterije.